About Me
Bonjour! I am currently working as a Research Assistant at ECPKn (école Centrale de Pékin), Beihang University (Hangzhou Campus), under the guidance of Assoc. Prof. Liang HAN. I received my Master’s degree from Beihang University in June 2024. My research includes formation control of Unmanned Aerial Vehicles (UAVs), path planning problems, and artificial intelligence applications in UAVs’ decision-making and planning.
Download my resumé.
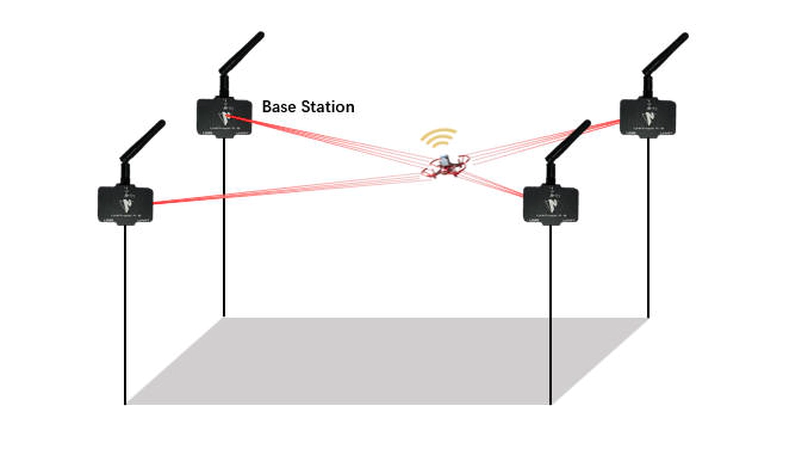
- Consensus based formation control
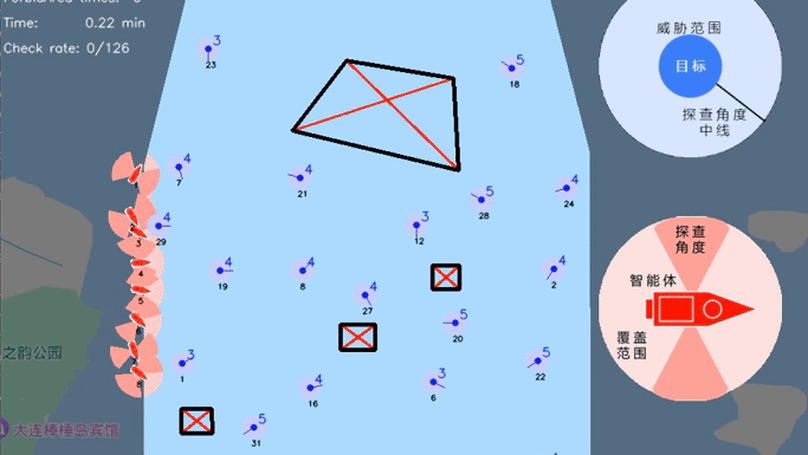
- Path planning
Bachelor of Information and Computer Science, 2020
Beihang University
Experience
Researches
scientific works and papers

Recent & Upcoming Talks
2023.05 - Literature Sharing - [slides]
A self-rotating, single-actuated UAV with extended sensor field of view for autonomous navigation, Science Robotics, 2023
2022.12 - Literature Sharing - [slides]
A Survey on Large-Population Systems and Scalable Multi-Agent Reinforcement Learning, arXiv preprint, 2022
2022.05 - Literature Sharing - [slides]
Trajectory Planning for Autonomous Vehicles Using Hierarchical Reinforcement Learning, ITSC, 2021
2021.11 - Literature Sharing - [slides]
Fractal Trajectories for Online Non-Uniform Aerial Coverage, ICRA, 2015